Research Areas
| Networked Robotic Systems
|
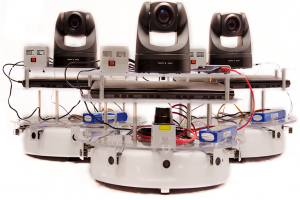
Networked robotic systems offer several advantages such as: i) task sharing and coordination, ii) reduced cost in design and deployment of individual entities, iii) robustness to failures of a few individuals, and iv) distributed operation for wide area coverage. These complex systems are engineered to achieve a macroscopic (i.e., global) objective by requiring minimal operational complexity at the microscopic (i.e., individual entity) level. Biological Science offers several examples of Systems of Systems (e.g., shoal of fish, flock of birds, and ant colonies) that exhibit emergent group behavior. Thus, a key challenge in engineering sciences is to learn the principles of emergent behavior from these biological systems, and to apply them for control of human-engineered systems, that could then be used for different distributed operations (e.g., cooperative search, rescue, and target-tracking). The objective is to generate simple rules, which govern the operational behavior of individual entities and their interactions, to yield the desired global performance. Click here to view videos of some real-world experiments. |
Intelligent Sensor Networks |
Distributed sensor networks are deployed for urban area monitoring as well as for Intelligence, Surveillance & Reconnaissance (ISR) operations (e.g., underwater sensor networks). The objective of these sensor networks is to observe and interpret gradually (or rapidly) evolving spatio-temporal phenomenon of the environment in which they are deployed. It is necessary to impart intelligence to these sensor networks such that they can make distributed decisions in the event of anomalies, abrupt environmental changes, and detection of targets. Typical control objectives include maximization of coverage area, minimization of energy consumption, improving the target detection probability, and accommodation of failures. It is also important that the local decisions are consistent with the global objectives. In order to make local decisions, the sensor nodes must have the capabilities of distributed learning and real-time pattern discovery. Furthermore, since the sensor nodes are usually randomly deployed, energy constraints must be considered to maximize the lifetime of the network because battery replacement can be infeasible and time consuming. This requires proper scheduling protocols to optimize the energy consumption. In this regard, the research at LINKS is focused on distributed learning as well as optimization & control aspects of sensor networks. |